[......]
[......]Arduino Uno 红外遥控 接收 和 发射信号 实验 (上)
Arduino Uno 红外遥控 接收 和 发射信号 实验 (上)
家中电视机,空调家电都是用红外遥控的,
这次实验,就是看看其接收与发射的原理。
所以需要两块Arduino Uno 分别做接收&发射
上篇 (本篇) Arduino Uno 红外遥控的接收
下篇 Arduino Uno 红外遥控 接收 和 发射信号 实验 (下)
先看看这个模块
实验效果
实验接收红外信号,并记录其信号。
在试验中,我用的是一[......]
Arduino红外遥控系列教程2013——发射与接收
Arduino红外遥控系列教程2013——发射与接收 关于Arduino红外发射与接收的教程,论坛已经有很多了,但作为IRremote应用系列教程的铺垫。在此整理重新发布一下
更新 2013.03.12
本系列教程已经告一段落,陆陆续续发布了6篇教程,4部视频和1个wiki语法手册。以后的精力要回归BOXZ啦。
1. Arduino红外遥控系列教程2013——发射与接收[链接]
2. Arduino红外遥控系列教程2013——红外转码[链接]
3. Arduino红外遥控系列教程2013——红外转码扩展应用1[链接]
4. Arduino红外遥控系列教程2013——红外协议之N[......]
Arduino教程(提高篇)——红外遥控(发射篇)
Arduino教程(提高篇)——红外遥控(发射篇)上一篇提到了红外编码的原理,此篇用arduino软件模拟发出38K的载波信号配合红外发射头,发出带有载波信号的38K红外光,使arduino变成红外遥控器,配合红外接收就用此可以遥控各家电。
例程1:红外发射模块(取缔红外遥控器)配合arduino制作成红外遥控器,用串口输入一个数字,遥控器发射出一段编码,一边用红外接收模块,显示出接收到的编码(红外接收参照http://www.arduino.cn/thread-1220-1-1.html此贴)
连线示意图:
<ignore_js_op>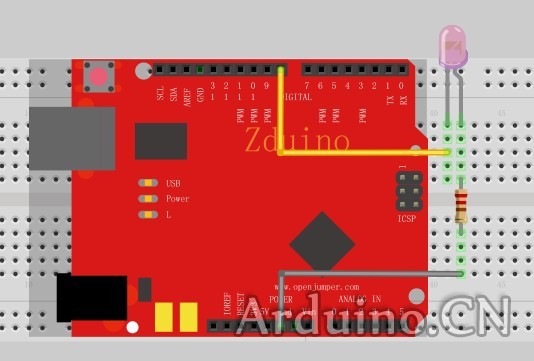
[C] 纯文本查看 复制代[......]
Android手机通过蓝牙模块HC-06连接Arduino串口输出
Android手机通过蓝牙模块HC-06连接Arduino串口输出
通过手机进行通信是可以实现很多遥控功能,虽然距离是比较短,一般是10米,但对于我这种新手做测试,比起买一个几百块的多通道遥控器成本要低很多。
实验目的:用Android实现蓝牙连接通过Arduino串口输出信息
这次使用的是蓝牙HC-06从模块,就是从机模块,这都因为买之前没有问清楚什么叫从什么叫住。
所以在这解释一下,如有错误请指正。谢谢
HC-05是主从模块,能做主机,从机。
HC-06是从模块,只能做从机。
[......]
Arduino Uno红外遥控接收和发射信号示例(一)
Arduino Uno红外遥控接收和发射信号示例(一)。
家中电视机,空调家电都是用红外遥控的,
这次实验,就是看看其接收与发射的原理。
所以需要两块Arduino Uno 分别做接收&发射
上篇 (本篇) Arduino Uno 红外遥控的接收
下篇 Arduino Uno 红外遥控 接收 和 发射信号 实验 (下)
先看看这个模块
实验效果
实验接收红外信号,并记录其信号。
在试验中,我用的是一个LED彩色灯条的红外遥[......]
Arduino 红外遥控16进制解码程序实例代码
Arduino 红外遥控16进制解码程序。
我上网找过很多红外解码的程序,都看起来挺麻烦的。后来才发现原来早有人编好了红外编码解码的函数库了。在此感谢极客工坊的弘毅大神,还有编写这个库的那位大神。
详细资料在:http://coopermaa2nd.blogspot.com/ 一个台湾人的blog,大陆需翻墙才能看到,里面关于红外解码还有发射红外信号写的非常详细,还有相关代码,有需要的可以翻墙看看,随便找个在线代理就可以了。
关于红外编码解码的原理网上太多了,我就不写在这了。直入正题!
首先,arduino IDE本来就有红外线IRremote的函数库,没有的可以去官网下。但是a[......]
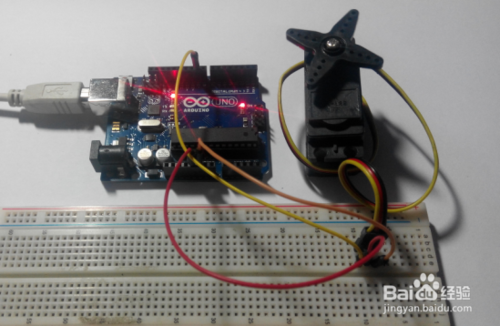
Arduino简单实例之Servo库舵机控制
Arduino简单实例之舵机控制。
1) 说明:。
舵机的旋转不像普通电机那样只是转圈圈,它可以根据你的指令旋转到0至180度之间的任意角度然后精准的停下来,常用于控制机器人。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的。需要使用Arduino上的PWM口控制(数字前带~的),Arduino 的驱动能力有限,所以当需要控制1 个以上的舵机时需要外接电源。一个机器人经常需要很多个舵机同时工作,此时需要加一个舵机控制板,舵机控制板本身是一个单片机,它不但能接16/24/32个舵机,同时也简化了舵机操作命令。
下例中使用的是9g的小舵机,用arduino[......]
Arduino 入门到精通 舵机控制
Arduino 入门到精通 舵机控制。
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0 度到1[......]
Arduino舵机的控制以及接线
舵机是一种电机,它是使用一个反馈系统来控制电机的位置。舵机通常情况下只能旋转180°。如果你玩儿过无线电操纵的飞机,就会接触到舵机,它们用来控制飞机的飞行轨迹。遥控汽车是使用舵机控制转向机构。模型船使用舵机控制船舵。舵机还常用于控制机器人的关节转动。这里我们将仅使用 Arduino UNO 控制器来控制一个舵机,不添加任何其他外设。