乐高EV3 PID巡线
乐高EV3巡线有很多种,其中有一种叫PID巡线,很多学生和老师并不是很明白,接下来就给大家介绍一下。

方法/步骤
-
在我们开始程序之前,我们首先了解如下项目:
1. PID的意义:
P-比例(proportion的首字母)
I-积分(integral的首字母)
D-导数(derivative的首字母)
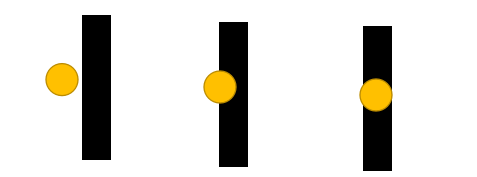
2. 单光巡线原理
黄色圆形代表传感器位置,黑色代表我们要巡的线。假设在左侧情况下反光值为50,右侧反光值为10,那么中间的反光值就大约等于30.如果传感器检测到反光值大于30,车体左偏,需要向右转;如果传感器检测到反光值小于30,车体右偏,需要向左转;如果传感器检测到反射光值等于30,直行。
-
在了解以上两点以后,我们的任务就很明确:让机器人尽量处于第二种状态。接下来我们就分析一下P,I,D是如何控制机器人的。
l 比例P
调节速率和偏差成比例,偏移越大调整越大。但是比例系数要适当,太小起不到作用,太大又容易摆动过大。
l 积分I
积分反应的是累计的偏差,通过累计的偏差来调整车的转向。
l 微分D
微分反应偏差的变化率,可以提前校正车的转向,增强稳定性。
但是微分和积分都不能单独起作用,都需要有P的基础,也就是实际会有四种控制方式,即:P,PI,PD,PID.
-
下面就给大家讲解一下如何用MINDSTOMS EV3软件做PID程序
首先,我们颜色传感器的端口是1,中间值30,巡左侧,电机是左A右B,用移动槽控制车转向。
接下来跟着如下步骤,我们把程序完成:
-
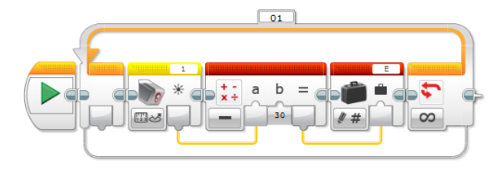
用一个线程来定义如下变量
其中:Kp-比例系数,Ki-积分系数,Kd-微分系数,I-积分,D-微分,E-误差,LE-上一次误差

-
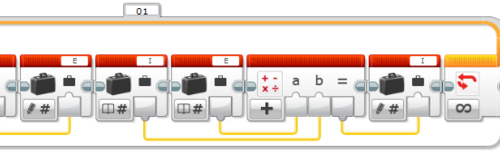
用另外一个线程先做出E
此处颜色传感器检测反射光强度,与30做差,算出误差值
-
继续做出I
此处将I和E做和再赋值给I,实现每次循环误差的累加
-
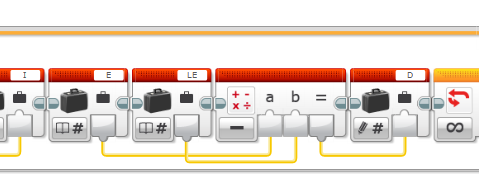
继续做出D
此处用本次误差-上次误差赋值给D
-
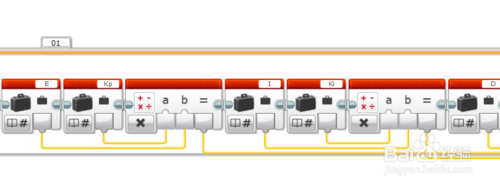
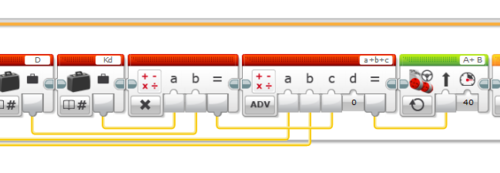
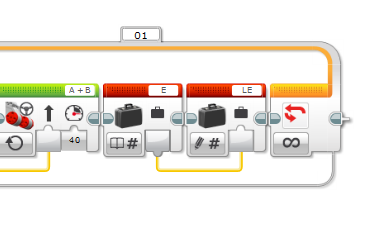
1. 各个部分分别乘以比例系数,相加赋值给移动转向的转向值
第三图为完整图,前两图为了让大家看得更清晰

-
接下来我们把E赋值给LE
-
至此,我们PID的巡线程序就都完成了,剩下的工作就是仔细调整Kp,Ki,Kd的值,使小车达到理想的巡线状态了